Out of this world.
Cornell Mars Rover, since its establishment in 2010, aims to design an innovative semi-autonomous rover to compete in the annual University Rover Challenge.
Our student-run team fosters creativity and intellectual growth through the development of our rovers. As engineers, we strive to cultivate a creative environment where brilliant young minds can develop innovative, intellectual, and leadership qualities through our vision of building a rover that may one day aid in the exploration of the final frontier.
6
Subteams
50
Members
14
Rovers
Our Subteams
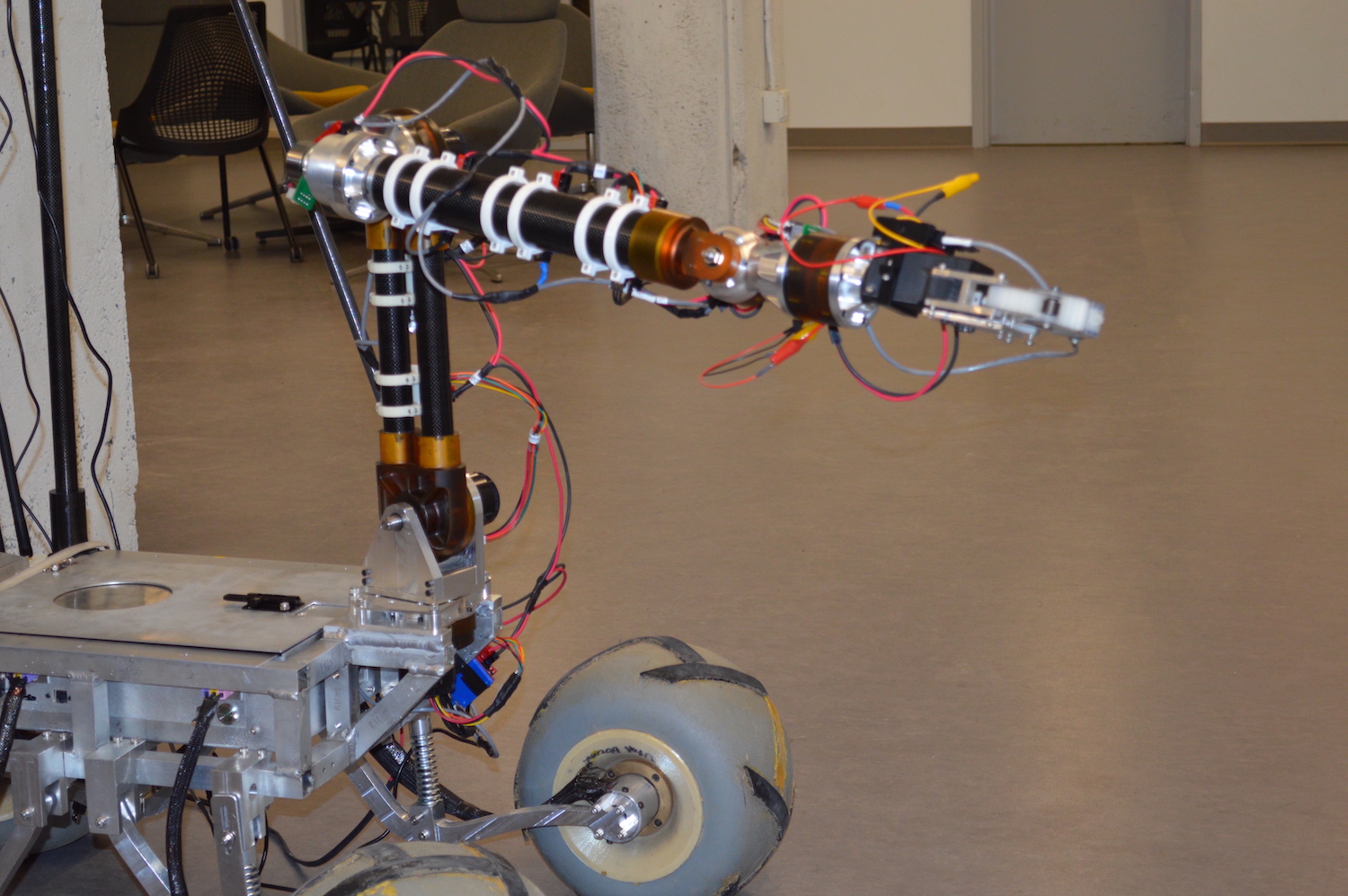
Arm
The Arm Subteam builds the rover's 6 axis robotic manipulator, which is the rover's primary means to interact with its environment. All six of the joints are powered by high power brushless DC motors and custom designed and manufacturing cycloidal gearboxes with minimal backlash to enable computer control of the arm using Inverse Kinematics.
One of the focuses this year is making the arm as simple to manufacture as possible to enable earlier integration and testing of the arm. This will give us time to fully troubleshoot the arm and its associated electrical and software components to a much larger degree than any past years, allowing us to greatly improve our performance in the Equipment Servicing and ERDM tasks.
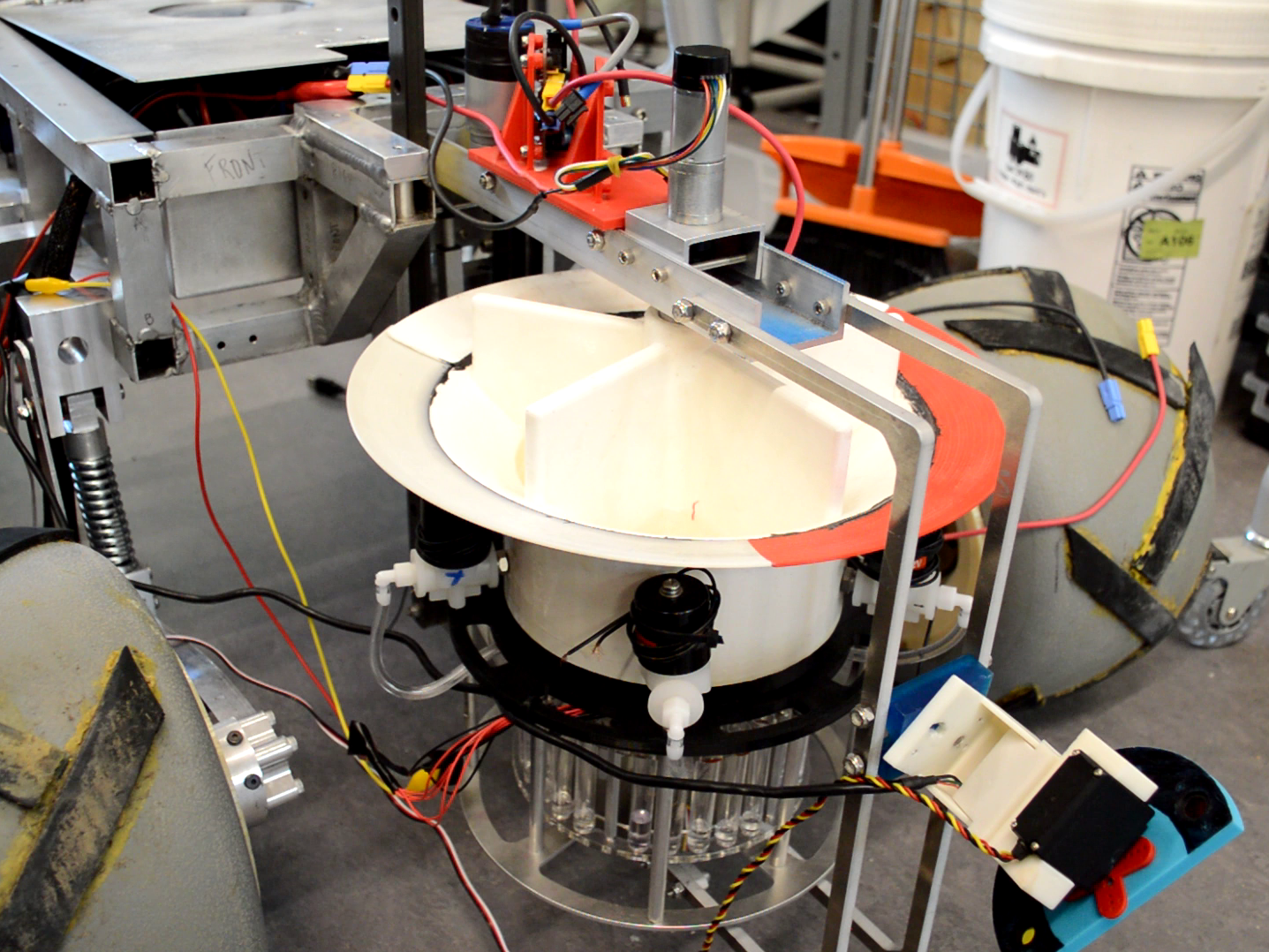
Astrotech
The AstroTech Subteam is responsible for designing and building systems to detect signs of life. The team consists of a mix of physicists, chemists, biologists, geologists, mechanical engineers, chemical engineers, and biological engineers. Our members collaborate to put together an onboard laboratory that can detect life from samples independently from any human intervention. The rover scoops and mixes soil samples with water, and then reacts that mixture with various chemicals that can tell us about the soil constituents.
Currently, we are working on implementing a spectroscopy system to improve reliability of soil sample analysis. In addition, the system performs rock analysis, which involves software-driven pattern recognition on a sample dataset built in house using various filters over a camera lens. Bridging together the work of our system designers and life scientists is the most important aspect of AstroTech.
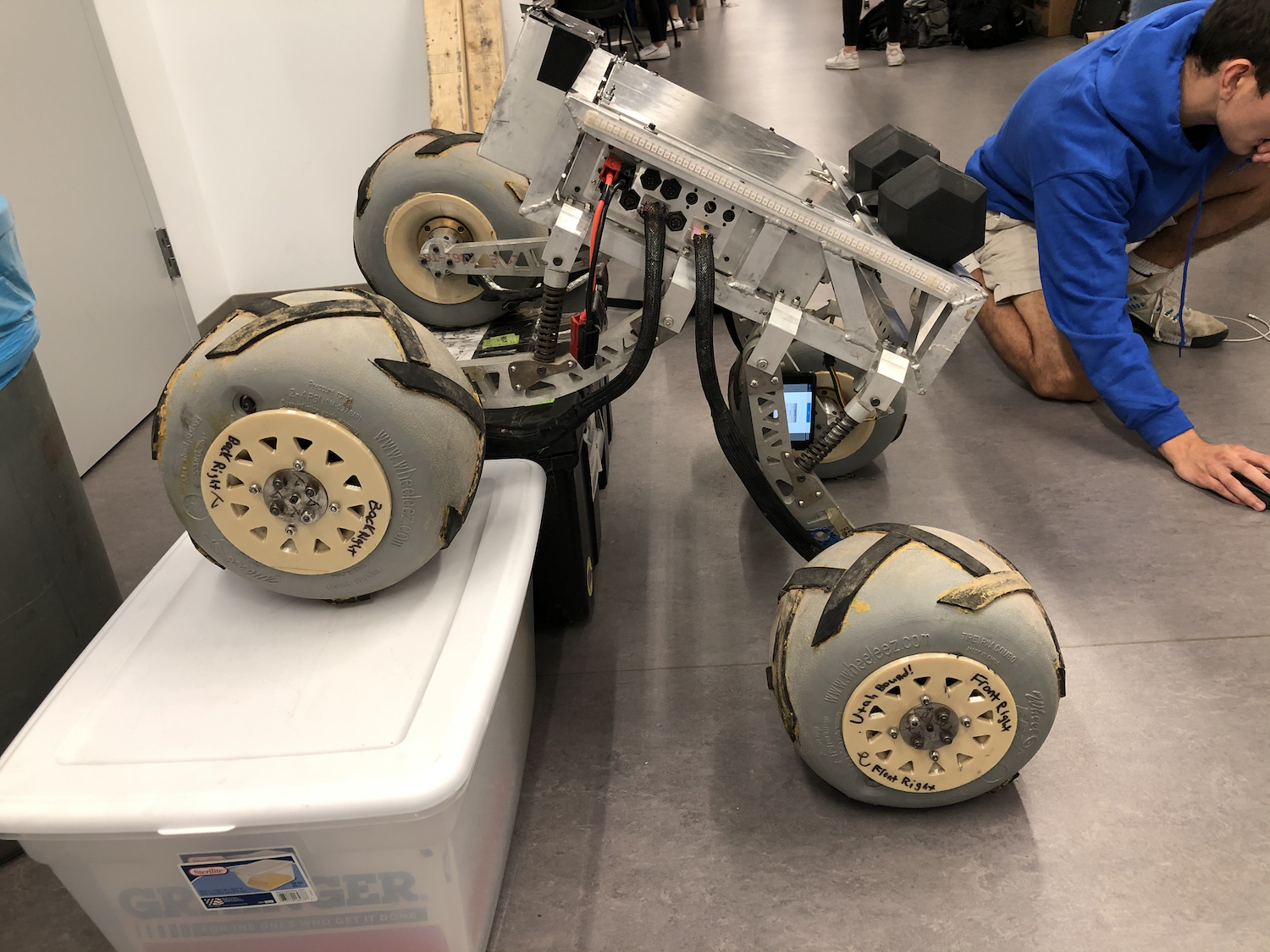
Drives
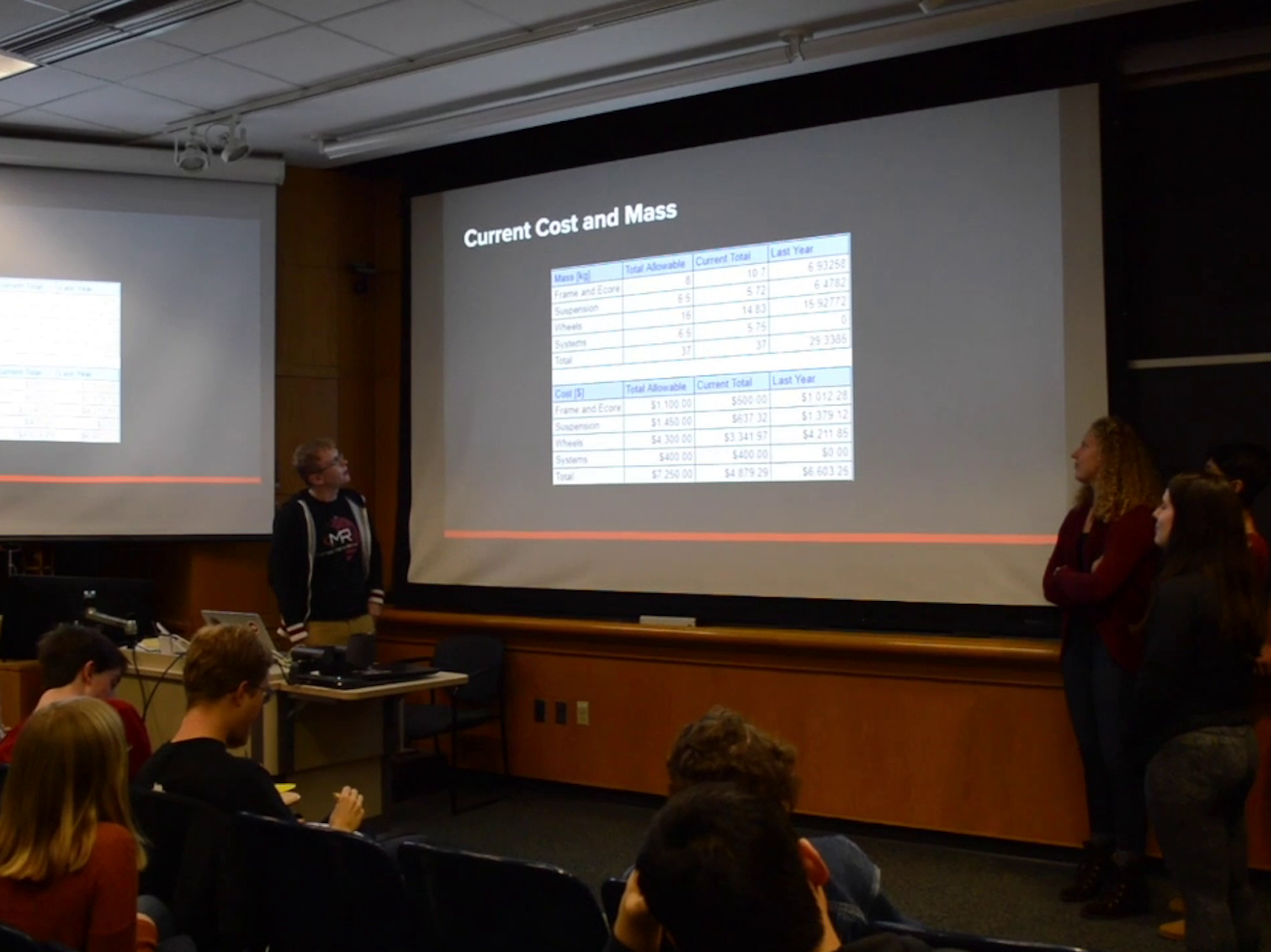
The Drives Subteam is responsible for designing and manufacturing the wheels, suspension, and frame such that the rover can traverse the rough competition terrain. Held in Utah, our Rover must navigate rocks, drops, and steep slopes up to 45 degrees. To do this, we are adapting a 6-wheel rocker-bogie suspension design, and designing flexible 3D printed drive wheels to reduce mass and absorb loadings.
In the Winter and Spring, we will manufacture our components in-house, and need your help to turn our designs into reality!
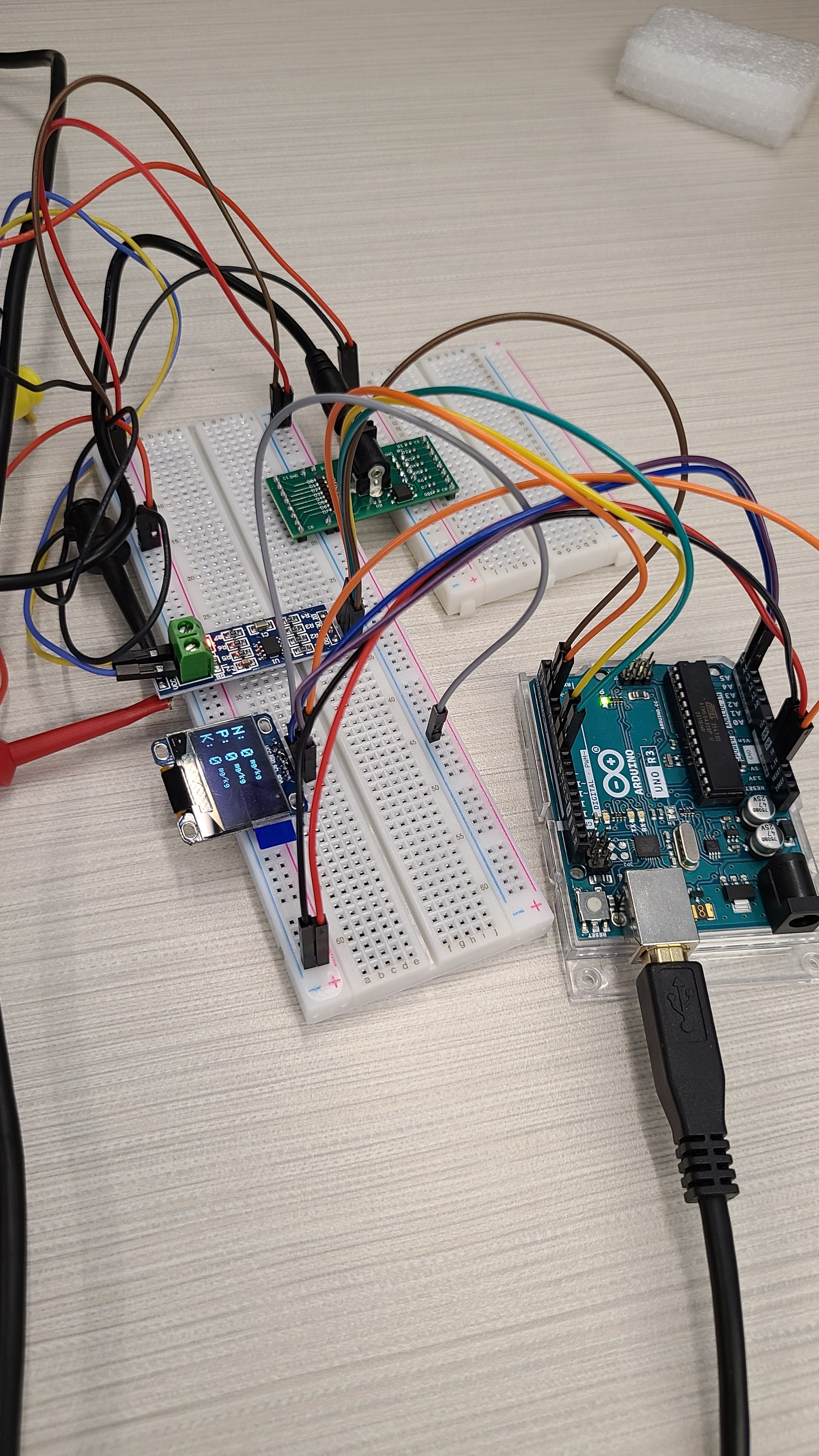
Electrical
The Electrical Subteam develops the hardware responsible for running all systems on the rover. Our primary goal is to design flexible and robust hardware that can be adapted to changing mechanical designs while still supporting the software subteam's requirements. Our system handles low level control of motors and sensors via PIC32 microcontrollers which are present on all boards, as well as power distribution across all electrical components.
This year, we are improving our custom brushless motor controllers to support the drives and arm subteams, and have also made upgrades our power distribution and battery management systems.
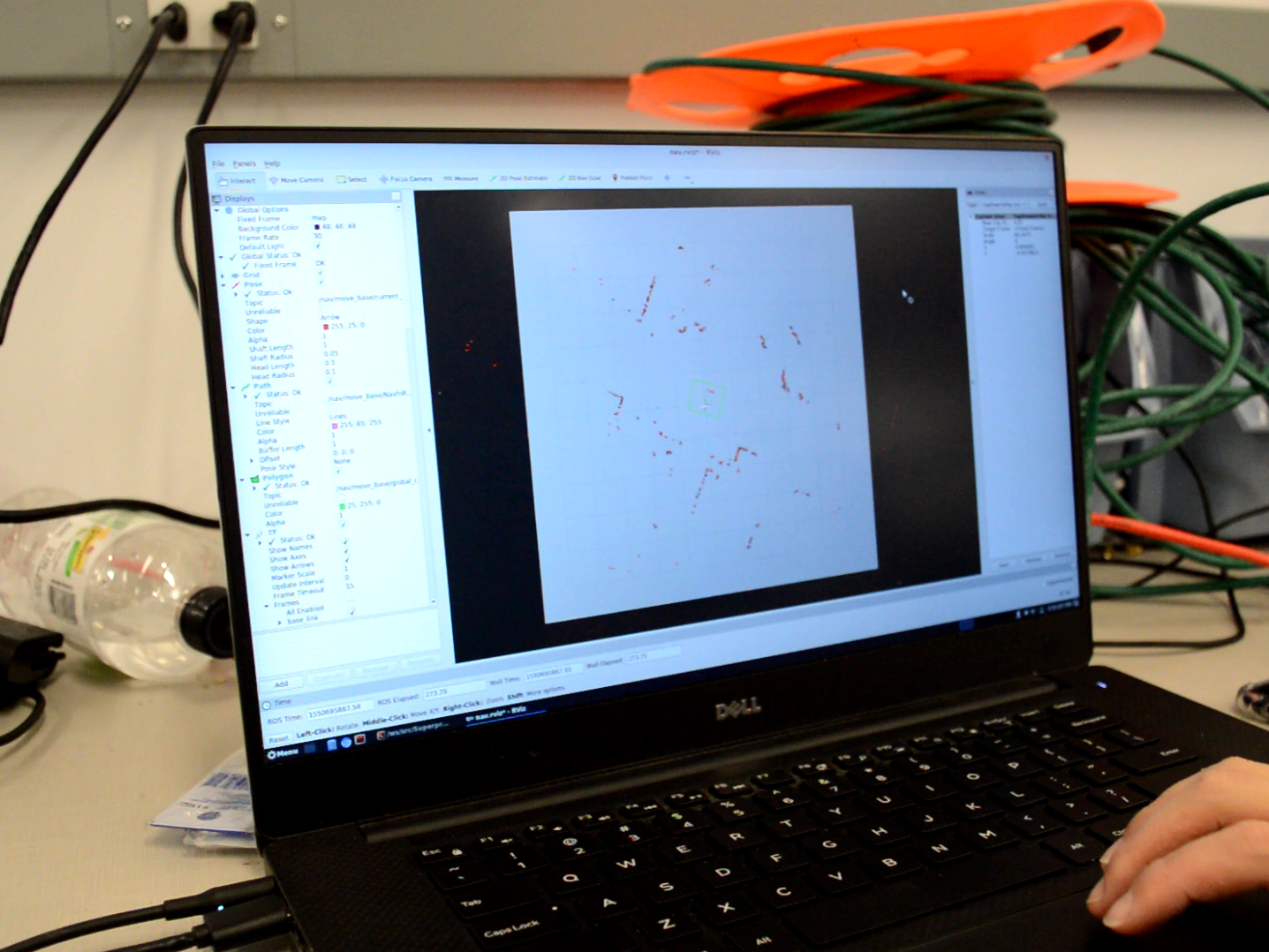
Software
The Software Subteam handles rover controls, path planning, user interfaces, and computer vision. Our projects this year include better controlling and maintaining the rover through graphical user interfaces, augmenting autonomous path planning using LIDAR and an enhanced computer vision system to guide our algorithms and streamlining the overall autonomy pipeline.
Our focus for URC 2022 is to upgrade the foundation of our entire software in order to support our work for the next several years. This gives us the opportunity to look at all of our software systems and make important design decisions to improve the performance and capabilities of the rover in all areas.
Business & Design
The Business Subteam is responsible for all other aspects that are needed to build a successful rover. This includes team finances, web design, graphic design, social media, video editing, and both public and sponsor outreach.
This year, we are working on a brand new website for our team, and working with industry mentors to provide valuable feedback on subteam designs.